Assignment 4¶
Changelog
v3.0 (11/12/2025) — Added demo for the backtracking mechanism.
v2.0 (11/12/2025) — Updated figures.
v1.0 (11/07/2025) — Initial release of Assignment 4 instructions.
Resources
MicroMouse Robot Maze Navigation
Version |
v3.0 |
|---|---|
Due Date |
11/27/2025 |
Points |
50 pts + 5 bonus pts |
Work Mode |
Group assignment |
Language |
C++17 |
Guidelines¶
This assignment is to be completed in groups, and all instructions must be followed carefully. Not adhering to these guidelines may result in a zero for the assignment.
Important
Each group member must contribute significantly to the project.
Keep your work private; do not share your files or code with other groups.
Any GitHub repository used for development must be private.
Submit your completed work as a zipped file via Canvas.
Feel free to discuss general concepts with other groups, but sharing specific implementation details is strictly forbidden.
The use of AI-generated code (e.g., ChatGPT, Copilot) for core logic is not permitted, though it may be used for documentation.
Overview¶
You will develop a C++ program that implements a MicroMouse Robot Navigation System for maze exploration. You are developing control software for a MicroMouse robot competing in autonomous maze navigation. The robot must efficiently navigate through an unknown warehouse-like 16x16 maze to reach one of the four center goal cells using sophisticated pathfinding algorithms and sensor systems.
Your robot can be configured for different scanning approaches (minimal detection or comprehensive sensing), demonstrating how different configurations produce different behaviors. Your system must demonstrate well-designed object-oriented architecture with clear separation between navigation logic and shared resources.
Key System Features:
Aggregation — Shared resources (maze, algorithm)
Encapsulation — Proper data hiding and access control
Modular Design — Separate systems working together cohesively
Configuration-Based Behavior — Single robot class with multiple operational modes
Random Goal Selection — Algorithm randomly selects one of four center goals for navigation
Simulator¶
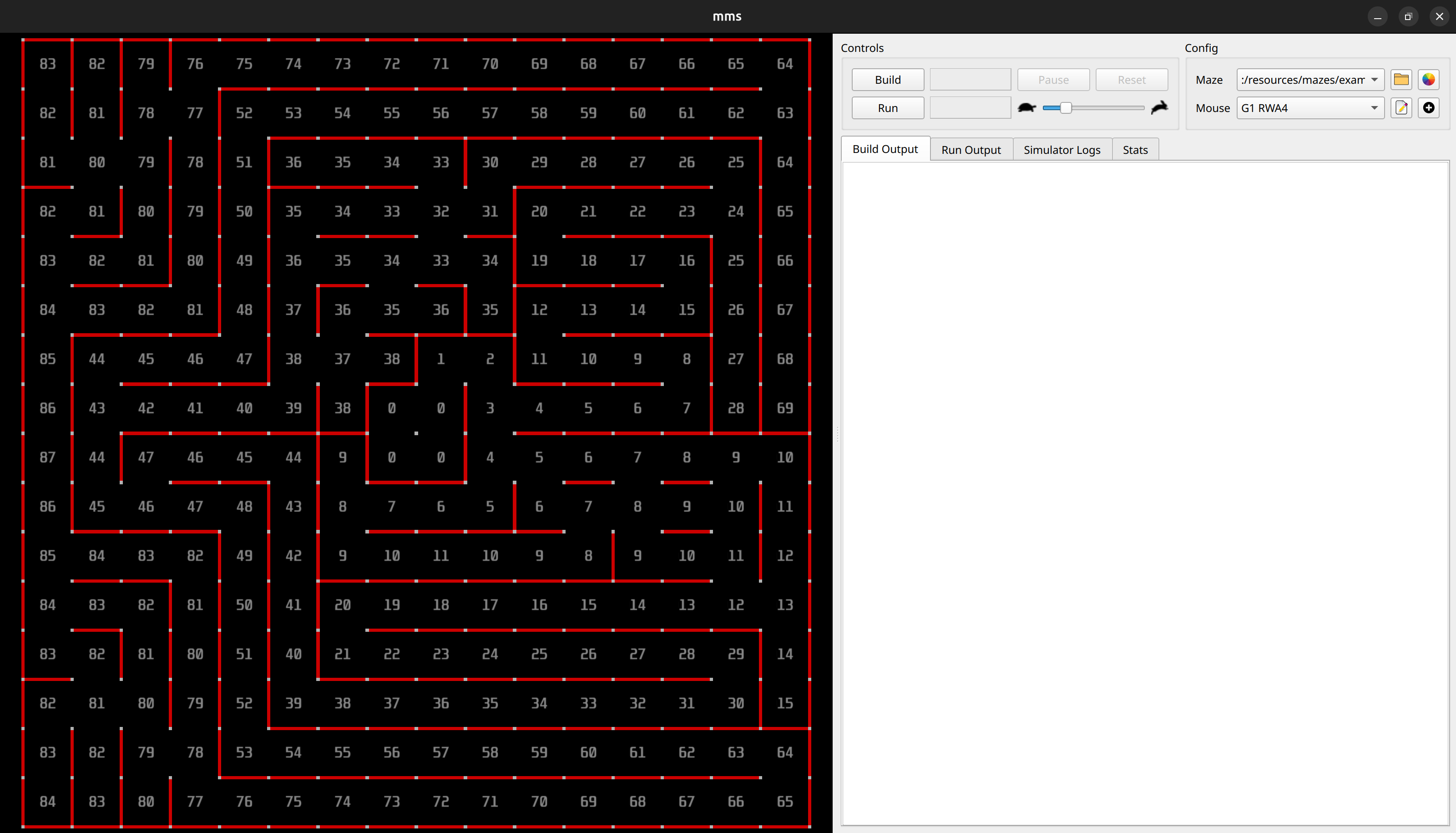
Your program is required to interface with a graphical user interface simulator (mms). The simulator makes it easy to write and test maze-solving code without a physical robot.
Installation¶
Todo
Download the Linux precompiled version of the simulator
Unzip the file, which generates the linux folder
cd <path to linux folder>chmod +x mms-x86_64.AppImage./mms-x86_64.AppImage --appimage-extract\(\rightarrow\) creates the folder squashfs-rootcd squashfs-rootchmod +x mms./mmsThe simulator should start (we will refer to this window as the mms window)
Maze Files¶
The simulator only provides the graphical user interface and functionalities to interact with your code. You will also need maze files. In order to use a maze in the simulator, it must be:
Nonempty
Rectangular
Fully enclosed
Also note that official Micromouse mazes have additional requirements:
No inaccessible locations
Exactly three starting walls
Only one entrance to the center
Has a hollow center, i.e., the center peg has no walls attached to it
Has walls attached to every peg except the center peg
Is unsolvable by a wall-following robot
Todo
Download maze files:
Follow instructions to retrieve the maze files.
or
git clone https://github.com/micromouseonline/mazefiles.git
Load maze files in the simulator.
Click the 🗂️ icon from the mms window
Navigate to the maze folder you cloned earlier
Select any file from mazefiles \(\rightarrow\) classic
Build and Run¶
Todo
Click on the + symbol to configure the simulator \(\rightarrow\) Edit Mouse Algorithm window.
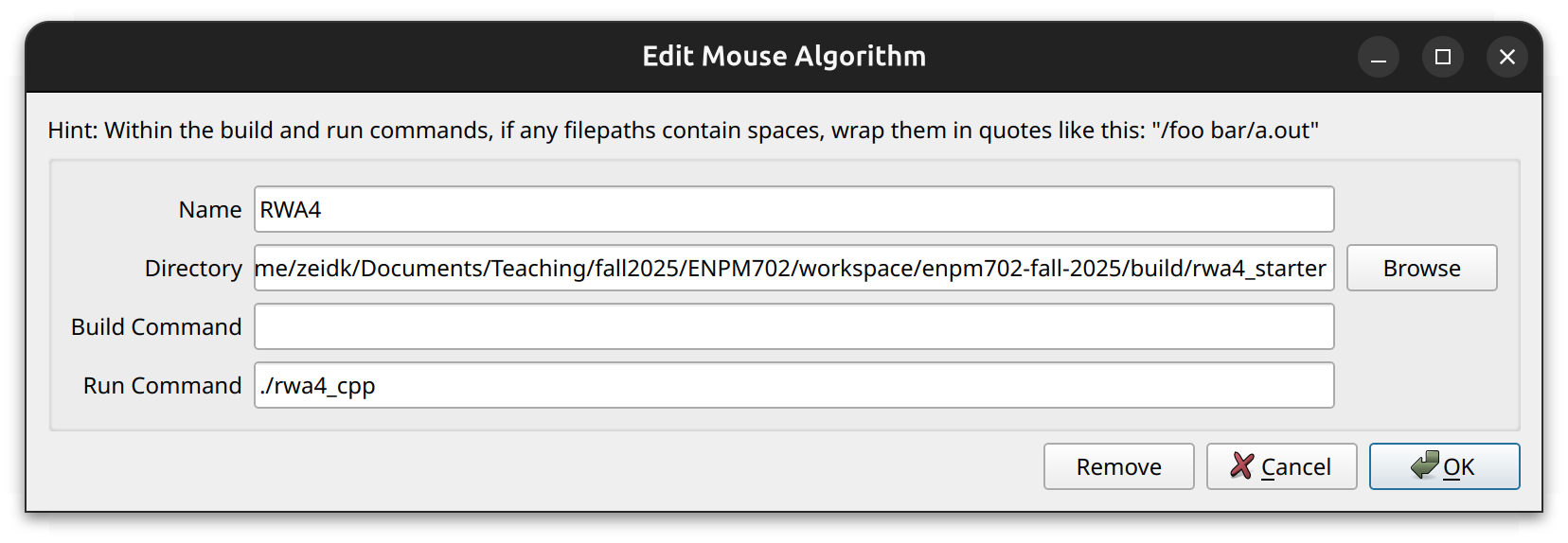
Name: Give a name to this configuration
Directory: Provide absolute path to your executable (inside the build folder)
Build Command: I suugest you leave this empty. We will build the project in Visual Studio Code. If you prefer to build the whole project from the simulator, you will need to enter the whole
g++command.Run Command: Name of the executable. The simulator will try to run it using the path provided in the Directory field.
Click OK
Write and build the project in Visual Studio Code
Click Run (mms window)
Simulator API Reference¶
The simulator provides an Application Programming Interface (API) that enables interaction between your code and the simulator.
The original API is available on GitHub: API.h.
For this assignment, the API has been modified to adhere to consistent class and attribute naming conventions, and it is encapsulated within the micro_mouse namespace. The modified API interface is defined in maze_api.hpp, and its corresponding implementation resides in maze_api.cpp.
An overview of the provided API is summarized below:
1 #pragma once
2 #include <string>
3
4 namespace micro_mouse {
5
6 /**
7 * @brief API for controlling and interacting with a maze environment
8 *
9 * This class provides methods to navigate through a maze, query maze
10 * properties, manipulate walls, set colors and text, and handle reset events.
11 */
12 class MazeControlAPI {
13 public:
14 /**
15 * @brief Get the width of the maze
16 * @return The width of the maze in cells
17 */
18 static int get_maze_width();
19
20 /**
21 * @brief Get the height of the maze
22 * @return The height of the maze in cells
23 */
24 static int get_maze_height();
25
26 /**
27 * @brief Check if there is a wall in front of the current position
28 * @return true if there is a wall in front, false otherwise
29 */
30 static bool has_wall_front();
31
32 /**
33 * @brief Check if there is a wall to the right of the current position
34 * @return true if there is a wall to the right, false otherwise
35 */
36 static bool has_wall_right();
37
38 /**
39 * @brief Check if there is a wall to the left of the current position
40 * @return true if there is a wall to the left, false otherwise
41 */
42 static bool has_wall_left();
43
44 /**
45 * @brief Move forward in the maze
46 * @param distance Number of cells to move forward (default: 1)
47 */
48 static void move_forward(int distance = 1);
49
50 /**
51 * @brief Turn right (clockwise) in the maze
52 */
53 static void turn_right();
54
55 /**
56 * @brief Turn left (counter-clockwise) in the maze
57 */
58 static void turn_left();
59
60 /**
61 * @brief Set a wall at the specified position and direction
62 * @param x X coordinate of the cell
63 * @param y Y coordinate of the cell
64 * @param direction Direction of the wall ('n', 's', 'e', 'w' for north,
65 * south, east, west)
66 */
67 static void set_wall(int x, int y, char direction);
68
69 /**
70 * @brief Clear a wall at the specified position and direction
71 * @param x X coordinate of the cell
72 * @param y Y coordinate of the cell
73 * @param direction Direction of the wall ('n', 's', 'e', 'w' for north,
74 * south, east, west)
75 */
76 static void clear_wall(int x, int y, char direction);
77
78 /**
79 * @brief Set the color of a cell in the maze
80 * @param x X coordinate of the cell
81 * @param y Y coordinate of the cell
82 * @param color Color character identifier
83 */
84 static void set_color(int x, int y, char color);
85
86 /**
87 * @brief Clear the color of a cell in the maze
88 * @param x X coordinate of the cell
89 * @param y Y coordinate of the cell
90 */
91 static void clear_color(int x, int y);
92
93 /**
94 * @brief Clear all colors from the entire maze
95 */
96 static void clear_all_color();
97
98 /**
99 * @brief Set text at the specified cell in the maze
100 * @param x X coordinate of the cell
101 * @param y Y coordinate of the cell
102 * @param text Text string to display at the cell
103 */
104 static void set_text(int x, int y, const std::string &text);
105
106 /**
107 * @brief Clear text from the specified cell in the maze
108 * @param x X coordinate of the cell
109 * @param y Y coordinate of the cell
110 */
111 static void clear_text(int x, int y);
112
113 /**
114 * @brief Clear all text from the entire maze
115 */
116 static void clear_all_text();
117
118 /**
119 * @brief Check if the maze was reset
120 * @return true if the maze was reset, false otherwise
121 */
122 static bool was_reset();
123
124 /**
125 * @brief Acknowledge that the reset has been handled
126 */
127 static void ack_reset();
128
129 /**
130 * @brief Print a message in the simulator
131 * To print anything in the simulator, use std::cerr
132 * @param text
133 */
134 static void log(std::string_view text);
135
136 }; // class MazeControlAPI
137
138 } // namespace maze
Warning
DO NOT MODIFY the provided API implementation. Your code should only call these static methods through the maze class wrapper methods. The API handles communication with the simulator through standard input/output streams.
Note
Algorithms communicate with the simulator via stdin/stdout. To issue a command, simply print to stdout. To read a response, simply read from stdin. All valid commands are listed below. Invalid commands are simply ignored.
std::cout sends commands to the simulator
std::cin reads commands from the simulator
std::cerr prints in the simulator’s main window
Todo
The starter package provides a simple left-wall follower. This is just for demonstration purpose as the robot is not expected to reach the center of the maze (due to the nature of the mazes).
1 #include <iostream>
2 #include <string>
3
4 #include "maze_api.hpp"
5
6 void log(const std::string& text) {
7 std::cerr << text << std::endl;
8 }
9
10 using MMS = micro_mouse::MazeControlAPI;
11
12 int main() {
13 log("Running...");
14 MMS::set_color(0, 0, 'G');
15 MMS::set_text(0, 0, "S");
16
17 MMS::set_text(7, 7, "(7,7)");
18 MMS::set_text(7, 8, "(7,8)");
19 MMS::set_text(8, 7, "(8,7)");
20 MMS::set_text(8, 8, "(8,8)");
21 MMS::set_color(7, 7, 'y');
22 MMS::set_color(7, 8, 'y');
23 MMS::set_color(8, 7, 'y');
24 MMS::set_color(8, 8, 'y');
25 while (true) {
26 if (!MMS::has_wall_left()) {
27 MMS::turn_left();
28 }
29 while (MMS::has_wall_front()) {
30 MMS::turn_right();
31 }
32 MMS::move_forward();
33 }
34 }
DFS Algorithm: Tree-Based Path Finding¶
Maze pathfinding can be conceptualized as a tree traversal problem, where the starting position serves as the root node and the goal position represents a target leaf. Each cell in the maze corresponds to a node in the tree structure, with accessible adjacent cells forming the children of the current node.
This assignment focuses on implementing a depth-first search (DFS) algorithm for maze navigation. While DFS provides a systematic approach to exploring all possible paths, it does not guarantee optimal solutions and typically does not produce the shortest route to the destination.
Algorithm Behavior¶
The DFS algorithm operates by starting at the root node and exploring each branch to its maximum depth before backtracking to explore alternative paths. This exhaustive exploration strategy ensures that all reachable nodes are eventually visited, though not necessarily in the most efficient order.
The key characteristic of DFS is its commitment to exploring as deeply as possible along each path before considering alternatives. When the algorithm encounters a dead end or reaches a previously visited node, it backtracks to the most recent node with unexplored neighbors and continues the search from there.
Goal Selection¶
The maze contains four goal cells located at the center: (7,7), (7,8), (8,7), and (8,8). Before beginning navigation, the algorithm must randomly select one of these four cells as the target destination. This random selection ensures that different runs may have different objectives, adding variability to the navigation demonstration.
Search Order Protocol¶
To maintain consistency in maze traversal, the following directional priority sequence must be followed:
North (↑) — First priority direction
East (→) — Second priority direction
South (↓) — Third priority direction
West (←) — Fourth priority direction
This ordering ensures deterministic behavior across different implementations and makes debugging more predictable. The algorithm will always attempt to move North first when multiple directions are available.
Implementation Details¶
DFS can be implemented using stacks with the last-in-first-out (LIFO) approach. The stack maintains the current exploration path and facilitates backtracking when dead ends are encountered. During traversal, nodes are pushed onto the stack when exploring new paths and popped during backtracking when no further progress is possible.
A list of visited nodes is essential to prevent infinite cycles and ensure each node is processed only once. Without this mechanism, the algorithm could become trapped in loops, especially in maze configurations with multiple paths between the same locations.
In C++, std::stack provides the LIFO data structure for maintaining the exploration path, while std::set serves as the visited nodes collection. The algorithm begins at the start node and systematically explores all possible paths until it either reaches the goal node or exhausts all reachable nodes.
Performance Considerations¶
The choice of std::set over std::vector for tracking visited nodes is crucial for performance. The algorithm frequently performs two operations on the visited collection: checking if a node has been visited and marking a node as visited. The following table demonstrates the significant performance difference between these data structures.
Operation |
std::vector |
std::set |
|---|---|---|
Lookup (“is visited?”) |
O(n) — linear search |
O(log n) — tree search |
Insert (“mark visited”) |
O(1) — push_back |
O(log n) — tree insertion |
Overall Impact |
Gets slower as maze grows |
Stays efficient |
The critical operation “is this node already visited?” occurs frequently during maze traversal. With std::vector, this requires searching through all previously visited nodes, creating a performance bottleneck that worsens as the maze size increases. In contrast, std::set provides logarithmic lookup time and automatically prevents duplicate entries, making it the optimal choice for this application. For large mazes containing thousands of nodes, this performance difference becomes substantial and can significantly impact the algorithm’s execution time.
Pseudocode¶
The iterative implementation of DFS uses explicit stack management to simulate the recursive call stack. The following pseudocode presents the complete approach:
Algorithm 1 (Depth-First Search for Maze Solving)
Inputs:
\(s\) (stack of nodes, initially empty)
\(v\) (list of visited nodes, initially empty)
\(m_{maze}\) (2D array representing the maze)
\(m_{goal}\) (goal node coordinates)
\(m_{start}\) (start node coordinates)
Output: true if a path to goal is found, otherwise false
\(s.\text{push}(m_{start})\)
while not \(s.\text{empty}()\) do
\(n \gets s.\text{top}()\) (examine current node without removing it)
if \(n = m_{goal}\) then return true (goal found)
if \(n \in v\) then (node already explored)
\(s.\text{pop}()\) (backtrack: remove dead end)
continue
\(v.\text{insert}(n)\) (mark current node as visited)
\(moved \gets \text{false}\)
if \(m_{maze}[n.x][n.y+1]\) is valid and \((n.x, n.y+1) \notin v\) then (check North)
\(neighbor.x \gets n.x, neighbor.y \gets n.y + 1\)
\(s.\text{push}(neighbor), moved \gets \text{true}\)
else if \(m_{maze}[n.x+1][n.y]\) is valid and \((n.x+1, n.y) \notin v\) then (check East)
\(neighbor.x \gets n.x + 1, neighbor.y \gets n.y\)
\(s.\text{push}(neighbor), moved \gets \text{true}\)
else if \(m_{maze}[n.x][n.y-1]\) is valid and \((n.x, n.y-1) \notin v\) then (check South)
\(neighbor.x \gets n.x, neighbor.y \gets n.y - 1\)
\(s.\text{push}(neighbor), moved \gets \text{true}\)
else if \(m_{maze}[n.x-1][n.y]\) is valid and \((n.x-1, n.y) \notin v\) then (check West)
\(neighbor.x \gets n.x - 1, neighbor.y \gets n.y\)
\(s.\text{push}(neighbor), moved \gets \text{true}\)
if not \(moved\) then \(s.\text{pop}()\) (backtrack)
return false (all reachable nodes explored, goal not found)
Demonstration¶
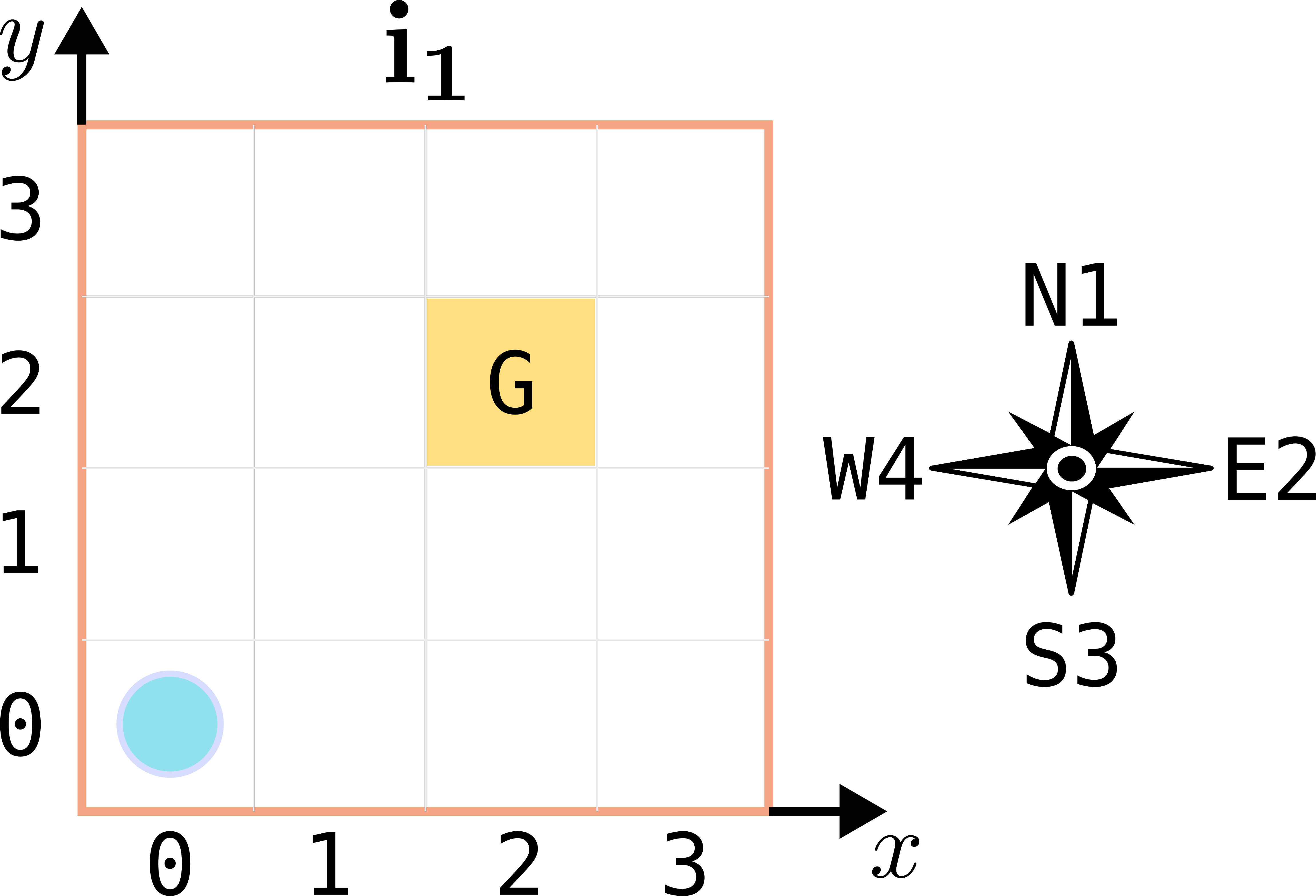
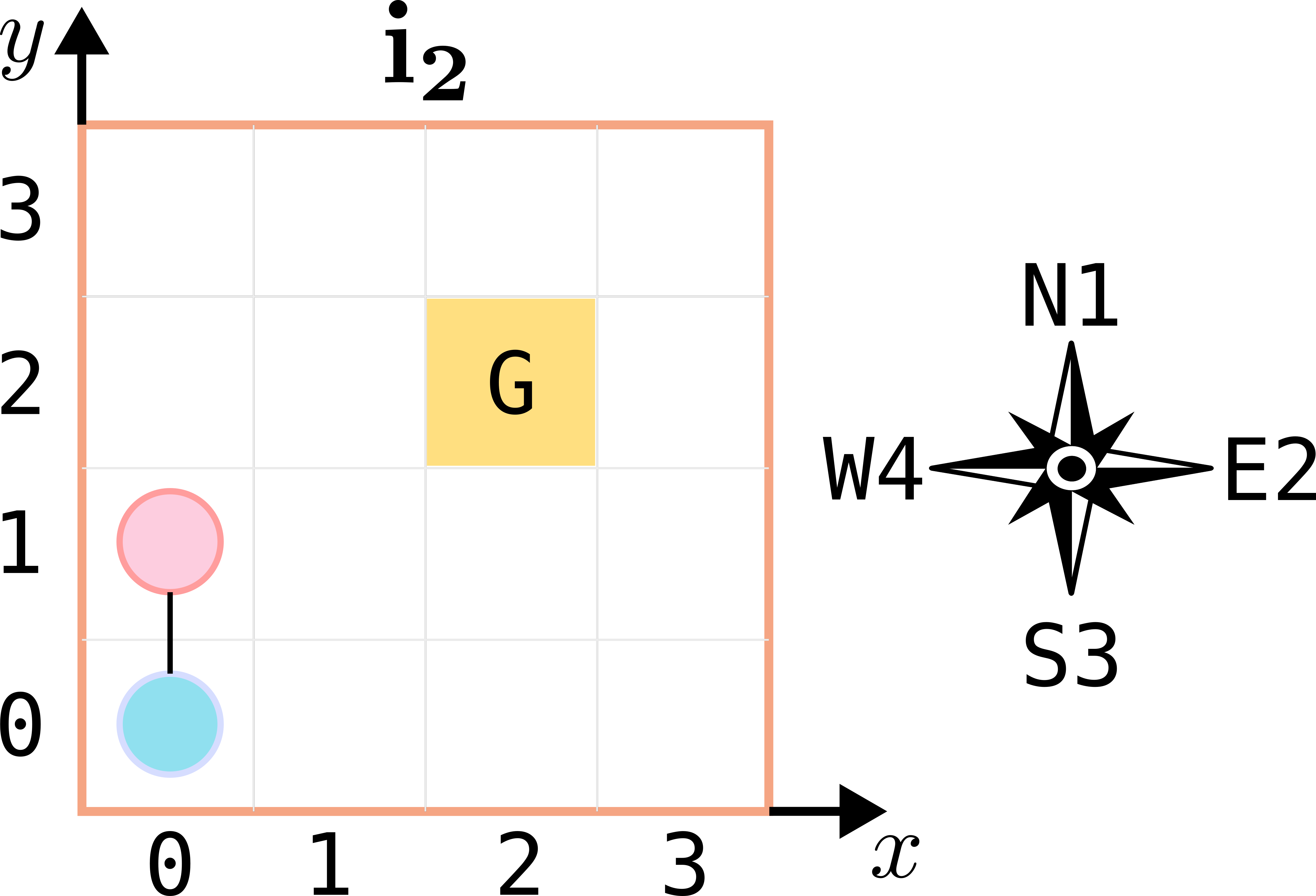
This section presents a visual example using a simple 4x4 maze. The depth-first search (DFS) algorithm begins at position (0, 0) and aims to reach the goal at position (2, 2). The exploration priority is defined as follows: (1) North, (2) East, (3) South, and (4) West. The algorithm has prior knowledge only of the maze’s perimeter walls.
Iteration 1¶
Demo
\(s=[(0,0)]\)
\(n=(0,0)\)
\(v=[(0,0)]\)
Iteration 2¶
Demo
\(s=[(0,1),(0,0)]\)
\(n=(0,1)\)
\(v=[(0,0),(0,1)]\)
Iteration 4¶
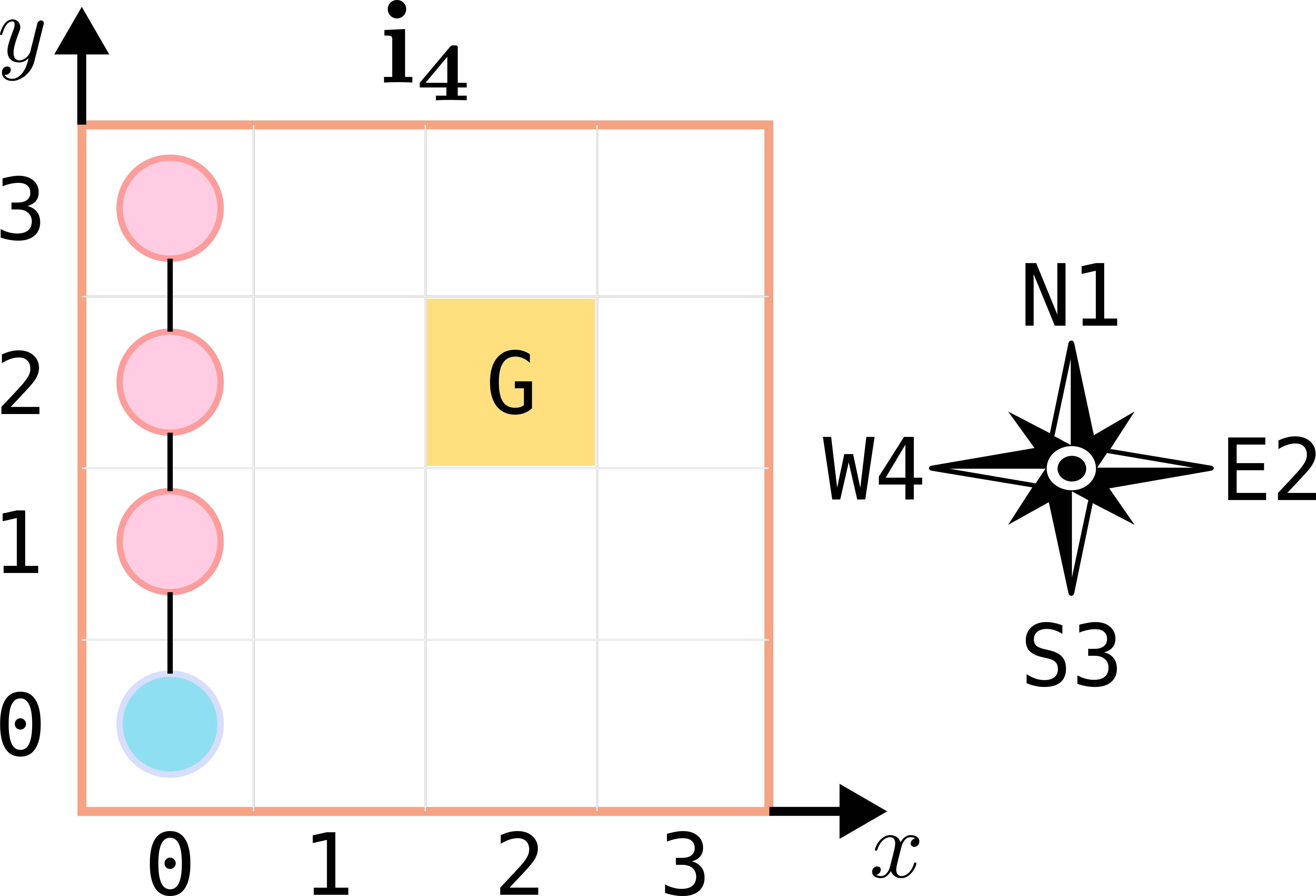
Demo
\(s=[(0,3),(0,2),(0,1),(0,0)]\)
\(n=(0,3)\)
\(v=[(0,0),(0,1),(0,2),(0,3)]\)
Iteration 5¶
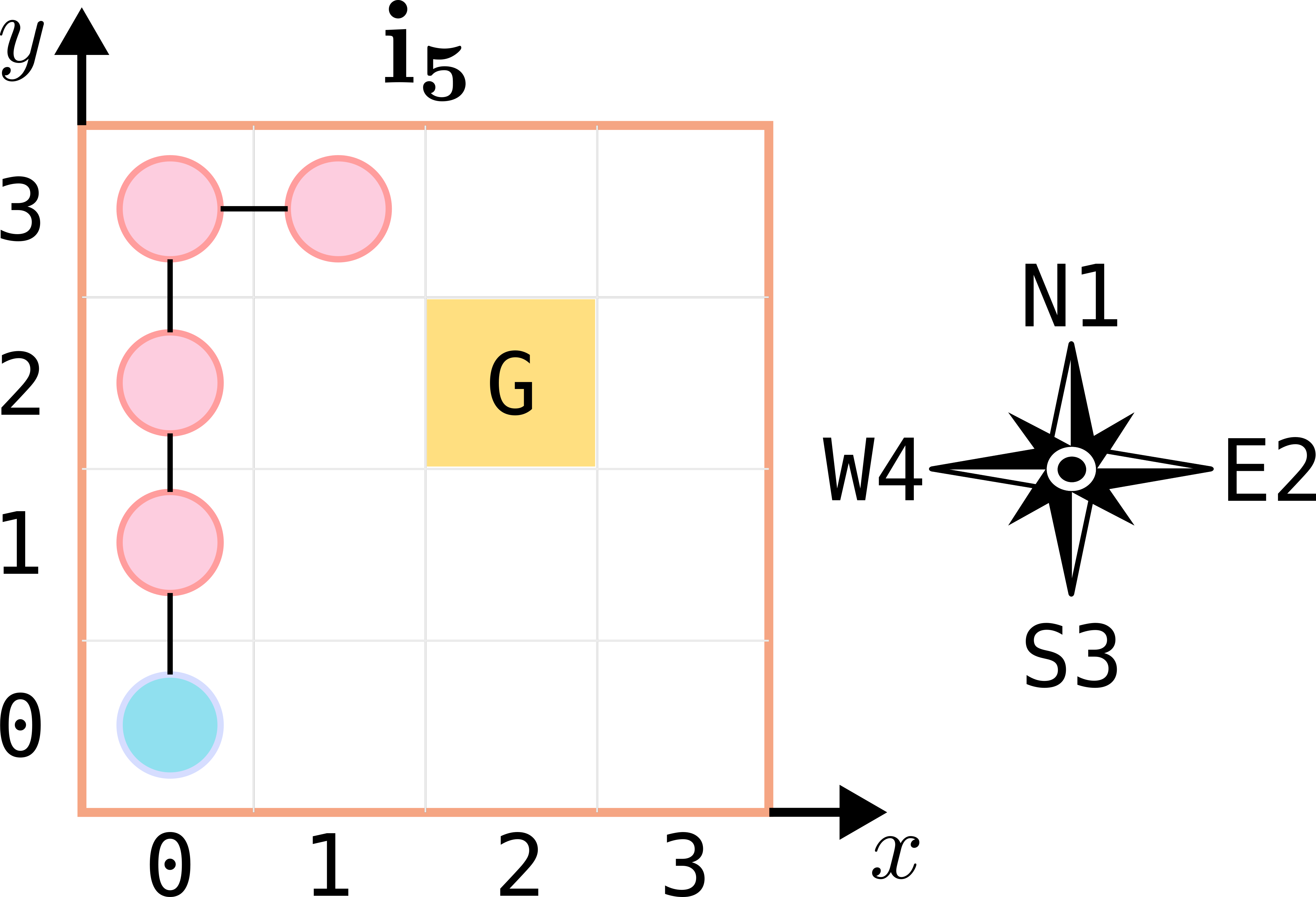
Demo
\(s=[(1,3),(0,3),(0,2),(0,1),(0,0)]\)
\(n=(1,3)\)
\(v=[(0,0),(0,1),(0,2),(0,3),(1,3)]\)
Iteration 13¶
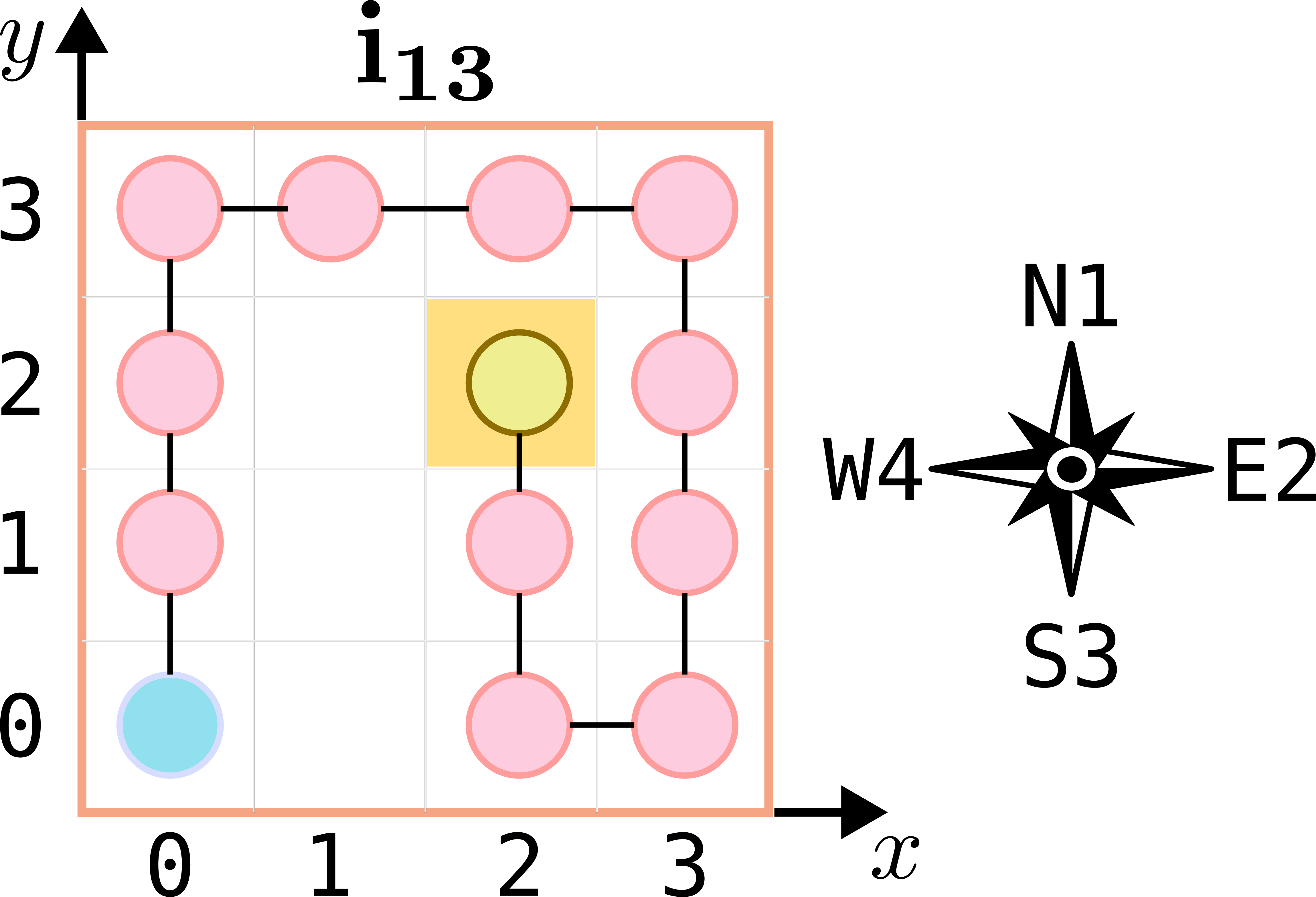
Demo
\(s=[(2,2),...,(3,3),(2,3),(1,3),(0,3),(0,2),(0,1),(0,0)]\)
\(n=(2,2)\)
\(v=[(0,0),(0,1),(0,2),(0,3),(1,3),(2,3),(3,3),...,(2,1)]\)
Path Following¶
Note
At the conclusion of the algorithm, the stack \(s\) holds the sequence of nodes from the goal back to the start. To obtain the correct path from start to goal, this stack must be reversed.
Algorithm 2 (Path-Follow with Conditional Replan)
Inputs:
\(s\) — stack representing the current path from start to goal
maze_ — internal maze representation
API — simulator interface
Output: Updated path \(s\) and synchronized maze state
for each cell \(c \in s\) do
Move robot to \(c\)
Sense walls \(D = \{\text{front}, \text{left}, \text{right}\}\)
// Usehas_wall_front(),has_wall_right(),has_wall_left()for each direction \(d \in D\) where a wall is detected do
Update maze_(c, d) to mark a wall
Use the API to synchronize visualization
// Useset_wall(int x, int y, char direction)
Let \(E_{\text{new}}\) be the set of edges blocked by any newly detected wall
Let \(P_{\text{rem}}\) be the set of edges on the remaining path in \(s\) (from \(c\) to goal)
if \(E_{\text{new}} \cap P_{\text{rem}} \neq \varnothing\) then
// if a newly detected wall blocks part of the path we intended to follow\(s \gets \text{DFS}(\text{current}=c, \text{goal}, maze\_)\)
// recompute pathif \(s = \varnothing\) then return false
return true
Demonstration¶
Backtracking Mechanism¶
When the algorithm reaches a position where no unvisited adjacent cells are available, the backtracking process begins. The algorithm retraces its steps along the current path, returning to previously visited nodes to identify unexplored branches. This systematic retreat continues until either:
An unvisited node is discovered along the backtracked path
All possible paths from the current branch have been exhausted
The process ensures complete coverage of all accessible areas within the maze structure while maintaining the integrity of the search path. Backtracking is what allows DFS to explore all possible solutions systematically.
Demonstration¶
DFS has reached a node requiring backtracking. The algorithm cannot move in any direction: North, East, and West are blocked by walls, while South leads to an already-visited node at \((0,2) \in v\). DFS will backtrack to the previous node in the stack.
Demo
\(s=[(0,3),(0,2),(0,1),(0,0)]\)
\(n=(0,3)\)
\(v=[(0,0),(0,1),(0,2),(0,3)]\)
\(n \in v \rightarrow s.pop()\)
new \(s[(0,2),(0,1),(0,0)]\)
The algorithm cannot explore East or West due to walls, and cannot go North or South because these nodes have already been visited (\((0,3) \in v\) and \((0,1) \in v\)). DFS will backtrack to the previous node in the stack.
Demo
\(s=[(0,2),(0,1),(0,0)]\)
\(n=(0,2)\)
\(v=[(0,0),(0,1),(0,2),(0,3)]\)
\(n \in v \rightarrow s.pop()\)
new \(s[(0,1),(0,0)]\)
The algorithm cannot explore East or West due to walls, and cannot go North or South because these nodes have already been visited (\((0,2) \in v\) and \((0,0) \in v\)). DFS will backtrack to the previous node in the stack.
Demo
\(s=[(0,1),(0,0)]\)
\(n=(0,1)\)
\(v=[(0,0),(0,1),(0,2),(0,3)]\)
\(n \in v \rightarrow s.pop()\)
new \(s[(0,0)]\)
The East branch has not been explored (\((1,0) \notin v\)). DFS will continue with this branch.
Design Phase¶
Before writing any code, you must design the architecture of your MicroMouse robot navigation system. The Design Phase focuses on transforming functional requirements into an object-oriented structure that clearly demonstrates abstraction, inheritance, composition, and aggregation.
This phase ensures that your implementation is modular, extensible, and aligned with sound software engineering practices.
Objectives¶
Model the system architecture using a UML Class Diagram.
Depict runtime interactions using a UML Sequence Diagram.
Demonstrate inheritance, composition, and aggregation explicitly in your design.
Implement polymorphism through an abstract base class
Algorithm.
Class Diagram¶
Create a UML class diagram that represents the key structural components of your system.
Required Elements:
Abstract Base Class
Define an abstract class
Algorithmthat declares common behaviors for maze-solving algorithms.It must include at least one pure virtual method (e.g.,
virtual void solve() = 0;).Derived classes should implement different algorithms (e.g.,
DFSAlgorithm,BFSAlgorithm, orRandomWalkAlgorithm).
Inheritance
Use inheritance to extend the base class
Algorithm.Ensure each derived algorithm shares a consistent interface but provides its own behavior.
Example: both
DFSAlgorithmoverridessolve().
Composition
Composition represents a has-a relationship where the contained object cannot exist independently of the containing class.
Example:
The
Robothas aMazeobject that represents the robot’s internal understanding of the maze.If the
Robotobject is destroyed, itsMazeshould also be destroyed.
UML Notation: filled diamond (◆) next to the owning class.
Aggregation
Aggregation represents a “uses” or “has access to” relationship where the associated object can exist independently.
Example:
The
Robotuses anAlgorithmobject to navigate.The
Algorithmmay be shared between multiple robots or swapped at runtime.
UML Notation: hollow diamond (◇) next to the aggregate class.
Sequence Diagram¶
Create a sequence diagram showing how objects interact during maze navigation. The diagram should illustrate dynamic behavior — the sequence of messages exchanged between the main system components.
Required Scenario:
The
Robotinitiates maze exploration.The
Algorithmcomputes the next move based on sensory input.The
Mazeupdates its internal map through composition.The
MazeControlAPI(simulator interface) updates the visualization.
Expected Message Flow:
RobotcallsAlgorithm.solve().Algorithmrequests maze information fromMaze.Algorithmdetermines the next move and instructs theRobot.RobotcallsMazeControlAPI::move_forward()or other relevant API functions.The
Mazeupdates wall information viaset_wall(x, y, d).
Your sequence diagram must clearly depict method calls and object lifetimes, highlighting polymorphism when the Algorithm instance refers to a derived class.
Submission Requirements¶
Include two UML diagrams:
design_class_diagram.png— Class Diagramdesign_sequence_diagram.png— Sequence Diagram
Note
Diagrams must follow standard UML notation and be legible.
Evaluation Criteria¶
Correct use of UML symbols and relationships.
Accurate and meaningful application of inheritance, composition, and aggregation.
Clear demonstration of polymorphism through the
Algorithmabstraction.Logical, modular, and well-organized class structure.
Completeness and clarity of both diagrams.
Implementation Phase¶
The Implementation Phase focuses on translating your design into a fully functional C++ program. In this stage, you will implement all classes defined in your class diagram and ensure that the system behavior aligns with your sequence diagram. Your implementation must demonstrate a strong understanding of object-oriented programming (OOP) principles, including encapsulation, inheritance, composition, aggregation, and polymorphism.
Objectives¶
Implement all classes, relationships, and behaviors outlined in the design phase.
Ensure clean modular separation between components.
Apply abstraction through an abstract class that defines the algorithm interface.
Demonstrate inheritance and polymorphism through derived algorithm classes.
Properly implement composition and aggregation relationships as modeled.
Maintain encapsulation and const-correctness throughout your code.
Implementation Overview¶
Your project should be organized according to the responsibilities of each class. Each component must serve a distinct purpose and align with your UML diagrams:
The Algorithm hierarchy defines the abstract interface for all maze-solving strategies.
The Robot serves as the main controller that interacts with the maze and delegates navigation to a selected algorithm.
The Maze class acts as an internal model of the environment, encapsulating all communication with the simulator.
The MazeControlAPI (provided) handles simulator-level interactions and must only be accessed through the Maze wrapper.
This structure enforces modularity and prevents direct dependencies on simulator internals.
Abstract Class and Polymorphism¶
Define an abstract class representing a general maze-solving algorithm. This class must specify the interface shared by all algorithm implementations. Derived classes should override the relevant methods to implement their specific navigation logic.
Polymorphism must be demonstrated by allowing the robot to hold a reference or pointer to the abstract base class and to invoke derived algorithm implementations at runtime. This enables flexible switching between algorithms without altering the robot’s logic.
Composition¶
Composition represents a strong ownership relationship. In your design:
The Robot must own its Maze instance.
The maze should not exist independently of the robot.
When the robot is destroyed, its maze is also destroyed.
This relationship emphasizes that the maze is a core internal component of the robot’s state. All maze-related functionality, including sensing, wall updates, and visualization synchronization, must occur through this composition relationship.
Aggregation¶
Aggregation represents a weaker “uses-a” relationship. In your design:
The Robot uses an Algorithm to perform navigation but does not own it.
The algorithm can be shared, replaced, or modified independently.
This relationship allows the robot to switch between algorithms (e.g., DFS, BFS) without altering its internal composition. Aggregation must be clearly demonstrated both in your UML and in your implementation structure.
Encapsulation and Abstraction¶
All data members must remain private or protected, accessible only through well-defined public methods. Avoid exposing raw internal states. Instead, provide accessors and mutators when necessary.
1 class Maze {
2 private:
3 int width_;
4 int height_;
5 public:
6 [[nodiscard]] int get_width() const noexcept { return width_; }
7 };
Abstraction should be maintained by hiding low-level simulator communication inside your Maze class, ensuring other classes remain simulator-agnostic.
Direct calls to the MazeControlAPI are strictly prohibited outside the Maze class. All simulator commands must go through the Maze wrapper methods to preserve abstraction and ensure that your logic remains decoupled from simulator implementation details.
1// maze.hpp
2class Maze {
3public:
4 void set_wall(int x, int y, char direction) {
5 micro_mouse::MazeControlAPI::set_wall(x, y, direction);
6 }
7
8 bool has_wall_left() const {
9 return micro_mouse::MazeControlAPI::has_wall_left();
10 }
11};
Implementation Notes¶
Follow your class and sequence diagrams faithfully.
Keep functions focused on single responsibilities.
Use modern C++ best practices, including uniform initialization, RAII, and const-correctness.
Do not use global variables or hard-coded constants.
Maintain consistent naming conventions as used in the starter package.
Verify successful compilation using the required build flags (
-Wall -Wextra -Werror -pedantic-errors).Use appropriate logging via
std::cerrfor simulator output.
Deliverables¶
Fully implemented source files corresponding to your class and sequence diagrams.
A working executable that interfaces correctly with the simulator.
Evidence of composition, aggregation, inheritance, and polymorphism in your implementation.
Updated documentation (comments and brief report) describing how your design was realized in code.
Evaluation Criteria¶
Correct and consistent translation of UML design into code.
Proper use of abstraction, inheritance, and polymorphism.
Correct implementation of composition and aggregation.
Adherence to encapsulation principles and avoidance of direct API access.
Code organization, readability, and compliance with modern C++ practices.
Successful integration and functional operation within the simulator environment.
Warning
Your code will be tested on different 16x16 mazes.
To help with visualization:
Use one color to visualize the path generated by the BFS algorithm.
Use a different color to highlight the robot’s current cell as it follows the path.
Submission¶
Before submitting, carefully review your project to ensure all requirements have been met and that your implementation runs correctly within the simulator environment. Each group must submit one zipped file named according to the format below:
File Naming Convention
Format: groupX_rwa4.zip
Example: group3_rwa4.zip
Use your assigned group number. Submissions that do not follow this naming convention may receive a penalty.
Submission Checklist¶
Use the checklist below to verify that your submission is complete and properly organized:
[ ] |
The file is named correctly as |
[ ] |
All required source files and headers are included |
[ ] |
UML class and sequence diagrams are provided in image format (PNG or SVG) and placed in the diagram folder in your project folder |
[ ] |
Implementation follows the design diagrams faithfully |
[ ] |
The project builds cleanly with |
[ ] |
The program runs successfully within the simulator without modification |
[ ] |
All simulator interactions occur through the Maze wrapper (no direct API calls) |
[ ] |
Doxygen documentation is complete and generated successfully |
[ ] |
Group members’ names and group number are included in a README file |
[ ] |
The zipped file contains only the relevant project files (no build folders or binaries) |
Pre-Submission Review¶
Important
Before submitting, all group members must review the “Summary of Past Assignment Issues” document posted on Canvas. This document highlights common mistakes observed in previous assignments (such as missing files, incorrect naming conventions, or direct API usage). Groups are expected to verify that these issues have been avoided in their current submission.
Submission Method¶
Submit your
groupX_rwa4.zipfile through Canvas under the Assignment 4 submission link.Late submissions will follow the course’s late policy.
Only one group member needs to upload the file, but all members must be listed in the README.
Grading Rubric¶
Total: 50 points (plus up to 5 bonus points for BFS)
UML Diagrams: Class & Sequence (10 pts)¶
Points |
Criteria |
|---|---|
9-10 pts |
Class and sequence diagrams are complete, consistent, and readable; correctly model inheritance, composition, aggregation, and polymorphism via an abstract |
6-8 pts |
Diagrams mostly correct with minor UML or consistency issues; relationships are present but one is under-specified (e.g., missing multiplicity or abstract marker). |
3-5 pts |
Partial diagrams; some relationships incorrect or missing; sequence flow unclear; noticeable UML notation errors. |
0-2 pts |
Diagrams missing or unusable; relationships not conveyed. |
Implementation Faithfulness to Design (8 pts)¶
Points |
Criteria |
|---|---|
7-8 pts |
Implementation closely follows the submitted diagrams (classes, responsibilities, relationships, method roles) with only minor, well-justified deviations. |
4-6 pts |
Mostly consistent; some classes or relationships diverge from the diagrams without clear rationale. |
1-3 pts |
Significant divergence from design; several elements reinterpreted or omitted. |
0 pts |
Implementation bears little relation to the diagrams. |
Algorithm Correctness & Behavior (DFS + Path Following) (10 pts)¶
Points |
Criteria |
|---|---|
9-10 pts |
DFS adheres to specified priority (N, E, S, W); maintains visited set; produces a valid path; conditional replan triggers only when newly detected walls block the remaining path; correct goal selection behavior; stack/path reversal handled correctly. |
6-8 pts |
DFS mostly correct; minor mistakes (e.g., occasional priority violation or edge case in replan); path reversal or visited handling slightly flawed but recoverable. |
3-5 pts |
DFS present but frequently incorrect; inconsistent priority; improper visited handling; replan logic missing or largely ineffective. |
0-2 pts |
DFS non-functional or absent. |
C++{} Core Guidelines & Best Practices (10 pts)¶
Points |
Criteria |
|---|---|
9-10 pts |
Strong adherence to C++ Core Guidelines and best practices (encapsulation, RAII, const-correctness, uniform initialization, clear ownership, error handling, naming consistency, no globals, warnings clean with |
6-8 pts |
Generally good practices; a few inconsistencies (e.g., occasional non-const, mixed naming, minor warnings). |
3-5 pts |
Several guideline violations; unclear ownership or resource handling; frequent warnings. |
0-2 pts |
Poor practices; widespread guideline violations; unstable build. |
Encapsulation, Composition & Aggregation Realization (5 pts)¶
Points |
Criteria |
|---|---|
5 pts |
Composition: Robot owns its Maze (lifecycle bound). Aggregation: Robot uses Algorithm without owning it (swappable). Encapsulation enforced; direct simulator API calls avoided outside the Maze wrapper. |
3-4 pts |
Relationships mostly realized; minor leakage of API or ownership ambiguity. |
1-2 pts |
Relationships partially realized or confused; some direct API bypass of wrapper. |
0 pts |
Relationships not implemented; direct API usage pervasive. |
Documentation (Doxygen & Comments) (4 pts)¶
Points |
Criteria |
|---|---|
4 pts |
Complete Doxygen documentation; clear, helpful comments; well-documented interfaces; brief usage notes where appropriate. |
2-3 pts |
Basic documentation with some missing elements; adequate comment coverage. |
1 pt |
Minimal documentation; poor comment quality. |
0 pts |
Missing or completely inadequate code documentation. |
Build & Simulator Integration (3 pts)¶
Points |
Criteria |
|---|---|
3 pts |
Project builds cleanly; runs in the simulator; correct interaction via the Maze wrapper; logging visible as required. |
2 pts |
Builds with minor warnings or setup friction; runs with occasional issues. |
1 pt |
Build/run problems requiring instructor intervention; fragile integration. |
0 pts |
Cannot build or run in the simulator. |
Note
Bonus (up to +5 pts): BFS Implementation
Implement a Breadth-First Search (BFS) variant as an additional algorithm (polymorphic with
Algorithm) and demonstrate it on the same simulator setup.Provide a brief note comparing DFS vs. BFS characteristics in this maze context (e.g., completeness, optimality on unweighted grids, memory usage).
Reference: Breadth-First Search (BFS) — Wikipedia