Assignment 3¶
Title: Robot Kinematics and Control
Course: ENPM702 - Introductory Robot Programming
Work Mode: Individual
Duration: 1.5 weeks
Due Date: 11/05/2025
Total Points: 36
Language Standard: C++17
Changelog
Version 1.2.0 (2025-10-30)
Simplified the terminal output
Removed shared pointer. Only use std::unique_ptr
Updated the pseudocode for lambdas. Both lambdas must be created in the main() function
Assignment Overview¶
This assignment integrates modern C++17 programming constructs (templates, lambdas, and smart pointers) with fundamental robotics concepts. You will build a simplified 2-DOF planar robot arm controller that demonstrates how software models, plans, and manages a robot’s motion.
You will:
Represent robot states and end-effector positions using Plain Old Data (POD) structs.
Implement forward kinematics to compute the end-effector pose from joint angles.
Generate a smooth linear trajectory between two configurations.
Apply a velocity-limit filter using a lambda callable.
Manage memory safely using smart pointers under the RAII principle.
The assignment emphasizes clear structure, modularity, and adherence to the C++ Core Guidelines.
Guidelines¶
This assignment is to be completed individually, and all instructions must be followed carefully. Not adhering to these guidelines may result in a zero for the assignment.
Do not use solutions or components created by others.
Keep your work private; do not share your files or code.
Any GitHub repository used for development must be private.
You may discuss general concepts with classmates, but sharing specific implementation details is strictly forbidden.
The use of AI-generated code (e.g., ChatGPT, Copilot) is not permitted unless explicitly allowed by the instructor for this assignment.
Use modern C++17 and follow the C++ Core Guidelines.
Warning
Respect the header/implementation contract.
Templates must be defined entirely in
.hppfiles.Non-templates: declare in
.hppand implement in.cpp.Do not change function signatures provided in the instructions unless explicitly stated.
Note
Avoid “Magic Numbers.”
Replace hard-coded values with named constexpr constants (e.g., velocity limit, default link lengths, sampling steps).
This improves readability and maintainability and will be graded under Code Quality.
Starter Project¶
Use the course’s Assignment 3 starter (
rwa3_starter) from the course GitHub (clone or pull the latest).The starter includes the expected layout and a minimal
CMakeLists.txt.Complete all TODOs in each file.
Complete all Doxygen comment blocks provided in the source and header files. Each comment has been pre-generated as a template; ensure that every description, parameter, and return value is clearly documented.
Here is an example from main.cpp that you need to complete:
1/** 2* @file main.cpp 3* @author your name (you@domain.com) 4* @brief 5* @version 0.1 6* @date 2025-10-25 7* 8* @copyright Copyright (c) 2025 9* 10*/
Submission Requirements¶
Develop your solution in your private repository or local workspace.
Ensure your code compiles without warnings.
Final submission:
Remove unused headers and dead code (commented code).
Zip the entire project (source + CMake files).
Name the archive:
rwa3_firstname_lastname.zip.Upload the zip to Canvas before the deadline.
Your submission must include:
CMakeLists.txt(properly configured for C++17 and warnings)All source files from the Starter Project section
A program that runs and produces output similar to the Example Terminal Output section
Tip
Self-check before submitting
Clean build (delete
build/), reconfigure, rebuild, run.Verify the printed trajectory counts, velocity clamping, and end-effector samples.
Ensure function/templates live in the correct files per the contract.
Concept Reference¶
Forward Kinematics¶
Forward kinematics computes the end-effector position from a known set of joint angles. It answers the question: “Where is the robot’s tool tip given the current joint configuration?”
For a 2-DOF planar arm, the link lengths are \(L_1\) and \(L_2\), and the joint angles are \(\theta_1\) and \(\theta_2\). The first joint angle \(\theta_1\) is measured between the x-axis and the first link \(L_1\), while the second joint angle \(\theta_2\) is measured between the first and second links.
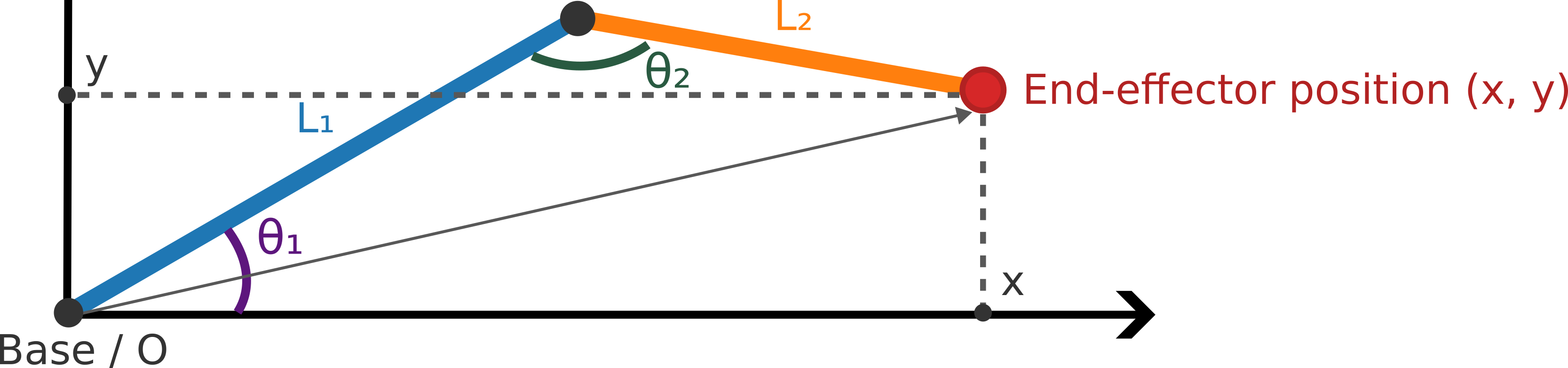
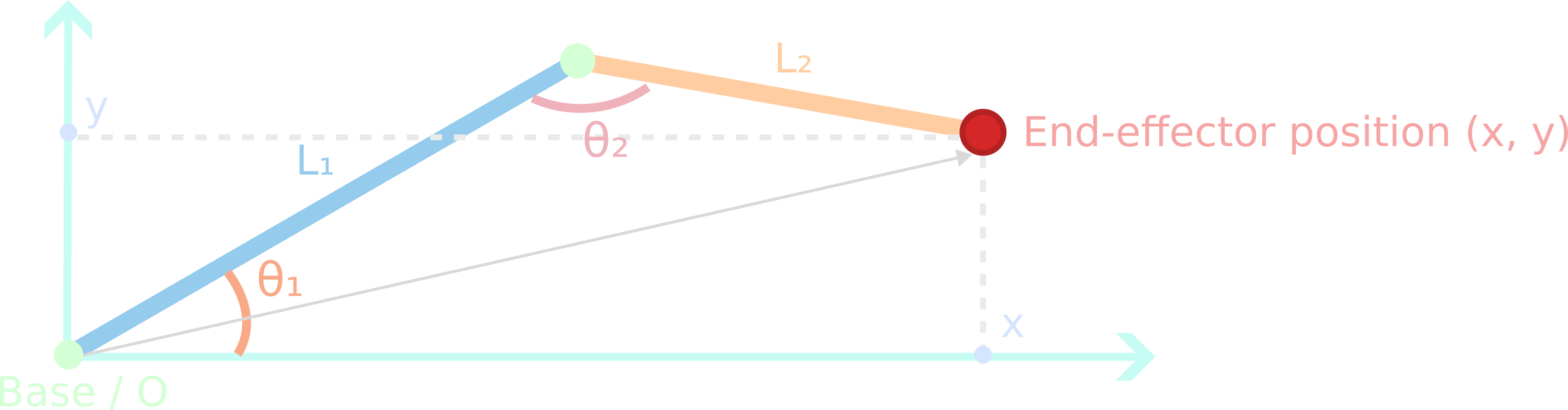
The end-effector position \((x, y)\) is calculated as:
This equation provides the Cartesian position of the end-effector and is essential for determining reachability, validating motion commands, and visualizing robot configurations.
Smooth Linear Trajectory¶
A trajectory is a sequence of robot states that defines how a robot moves from one configuration to another over time. A smooth linear trajectory ensures continuous, predictable motion without sudden jumps.
In this assignment, you will:
Linearly interpolate joint angles between the start and goal positions using a scalar \(\alpha \in [0,1]\).
Compute joint velocities corresponding to the rate of change in joint angles.
This process simulates a motion planner that generates intermediate waypoints for smooth robot motion.
Velocity-Limit Filter¶
Real robots must respect joint velocity constraints to prevent mechanical stress or instability. The velocity-limit filter ensures each joint’s angular velocity remains within safe limits (\(|d\theta| \le 1.0\) rad/s).
You will implement this filter as a lambda function, which:
Takes a
JointStateas input.Checks its joint velocities.
Clamps them to the allowed maximum if necessary.
Returns the filtered
JointState.
This demonstrates how to use lambda expressions for inline, real-time control operations.
Task 1 - Robot State POD Structs (6 pts)¶
Objective: Define the core data structures representing the robot’s joint states and end-effector pose.
Instructions:
Define a
JointStatestruct containing:theta1andtheta2: joint angles (in radians).dtheta1anddtheta2: joint velocities (in radians per second).
Use default member initializers for velocities:
struct JointState { double theta1; // radians double theta2; // radians double dtheta1 = 0.0; // Default velocity double dtheta2 = 0.0; // Default velocity };
This allows:
JointState q{M_PI/4, -M_PI/6}; // velocities default to 0.0
Define an
EndEffectorPosestruct containingxandy(in meters).Implement
void print_joint_state(const JointState&)inrobot_types.cppto print joint values and velocities clearly.Demonstrate aggregate initialization (no constructors).
Task 2 - Forward Kinematics Template (8 pts)¶
Objective: Compute the robot’s end-effector position from its joint angles.
Instructions:
Implement
forward_kinematics()as a templated function inrobot_kinematics.hpp.Input: any type with members
theta1andtheta2.Output: an
EndEffectorPosewith (x, y) coordinates.
Use
<cmath>functions (std::cos,std::sin).Return the computed pose.
Implementation Example:
#pragma once
#include "robot_types.hpp"
#include <cmath>
template <typename State>
EndEffectorPose forward_kinematics(const State& s,
double L1 = 0.5,
double L2 = 0.3) {
EndEffectorPose pose;
// pose.x = ??;
// pose.y = ??;
return pose;
}
Task 3 - Linear Trajectory and Velocity Filtering (8 pts)¶
Objective: Generate intermediate robot states between a start and goal configuration, and apply a velocity-limit filter.
Instructions:
Implement
interpolate_linear()(templated) inrobot_control.hpp:Input: start and goal states, scalar \(\alpha \in [0,1]\).
Output: interpolated
State.Behavior:
Interpolates
theta1andtheta2linearly.Computes
dtheta1anddtheta2proportionally to the angle change.
Implement
apply_filter()inrobot_control.cpp:Input:
std::vector<JointState>&andstd::function<JointState(const JointState&)>.Apply the filter in-place to each element.
In
main.cpp, define a lambda that limits joint velocities (\(|d\theta| \le 1.0\) rad/s) and pass it toapply_filter().
Pseudocode (for reasoning, not code)
The linear interpolation of angles is defined by:
A simple proportional velocity assignment may be based on the angle change over the interpolation span:
Velocity clamping ensures joint rates stay within the bound \(|d\theta| \le 1.0\):
Pseudocode: interpolate_linear(start, goal, α)
Pseudocode: apply_filter(traj, filter)
Pseudocode Lambda: clamp_to_limit(v, limit)
Pseudocode: Lambda: clamp_vel(s)
Task 4 - Trajectory Management with Smart Pointers (8 pts)¶
Objective: Integrate all components into a single simulation demonstrating motion planning, filtering, and memory safety.
Instructions:
Use
std::make_uniqueto create a vector ofJointStaterepresenting the trajectory.Generate 21 states using
interpolate_linear()(from \(\alpha=0\) to 1 in steps of 0.05).Apply the velocity filter using
apply_filter().Use
std::make_uniqueto create a vector ofEndEffectorPose.For each filtered state, compute the end-effector pose using
forward_kinematics().Print:
Trajectory size.
Start and end states (use
print_joint_state()).
Demonstrate that all resources are released automatically (RAII).
Task 5 - Joint Limit Validation (Optional, Not Graded)¶
In real robot systems, each joint can only move within a specific range of motion. For example, a shoulder joint may rotate roughly \(\pm180^{\circ}\), while an elbow joint might only bend between \(0^{\circ}\) and \(90^{\circ}\). Exceeding these limits could cause physical damage or unsafe motion.
For extra practice, you can create a small helper function that checks whether a given robot configuration stays within valid joint limits.
In plain terms:
Write a function that takes the current robot joint state as input.
Inside, check that both joint angles are within reasonable limits (for instance, between \(-\pi\) and \(\pi\)).
Return true if both joints are within limits, or false otherwise.
You can make this a templated helper function so that it works with any state type that has
theta1andtheta2members.
This is not graded, but it is a valuable addition for testing safety and reliability in your robot control code.
Example Terminal Output¶
=== Robot Kinematics & Control ===
Generating smooth trajectory between:
Start -> θ1 = 0.0000 rad | θ2 = 0.0000 rad | dθ1 = 0.0000 rad/s | dθ2 = 0.0000 rad/s
Goal -> θ1 = 0.7854 rad | θ2 = -0.5236 rad | dθ1 = 0.0000 rad/s | dθ2 = 0.0000 rad/s
Trajectory points: 21
Unfiltered Trajectory (every 5th point shown):
[0] θ1 = 0.0000 rad | θ2 = 0.0000 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[5] θ1 = 0.1963 rad | θ2 = -0.1309 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[10] θ1 = 0.3927 rad | θ2 = -0.2618 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[15] θ1 = 0.5890 rad | θ2 = -0.3927 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[20] θ1 = 0.7854 rad | θ2 = -0.5236 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
Applying velocity-limit filter: |dθ| ≤ 1.0000 rad/s
-> Filter applied successfully, all values within limits.
Filtered Trajectory (first 5 points):
[0] θ1 = 0.0000 rad | θ2 = 0.0000 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[1] θ1 = 0.0393 rad | θ2 = -0.0262 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[2] θ1 = 0.0785 rad | θ2 = -0.0524 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[3] θ1 = 0.1178 rad | θ2 = -0.0785 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
[4] θ1 = 0.1571 rad | θ2 = -0.1047 rad | dθ1 = 0.7854 rad/s | dθ2 = -0.5236 rad/s
Computing end-effector poses for filtered trajectory...
Link lengths: L1 = 0.50 m, L2 = 0.30 m
End-Effector Trajectory (all points):
[0] x = 0.8000 m, y = 0.0000 m
[1] x = 0.7996 m, y = 0.0236 m
[2] x = 0.7984 m, y = 0.0471 m
[3] x = 0.7963 m, y = 0.0705 m
[4] x = 0.7934 m, y = 0.0939 m
[5] x = 0.7898 m, y = 0.1172 m
[6] x = 0.7853 m, y = 0.1403 m
[7] x = 0.7800 m, y = 0.1632 m
[8] x = 0.7739 m, y = 0.1859 m
[9] x = 0.7670 m, y = 0.2083 m
[10] x = 0.7594 m, y = 0.2305 m
[11] x = 0.7510 m, y = 0.2524 m
[12] x = 0.7418 m, y = 0.2739 m
[13] x = 0.7319 m, y = 0.2951 m
[14] x = 0.7213 m, y = 0.3159 m
[15] x = 0.7100 m, y = 0.3363 m
[16] x = 0.6980 m, y = 0.3563 m
[17] x = 0.6853 m, y = 0.3758 m
[18] x = 0.6719 m, y = 0.3948 m
[19] x = 0.6579 m, y = 0.4132 m
[20] x = 0.6433 m, y = 0.4312 m
Summary
--------
• Total joint states: 21
• Velocity filter: active (|dθ| ≤ 1.0000)
Program finished successfully.
Code Quality and C++ Guidelines (6 pts)¶
Your code will be graded for adherence to C++ Core Guidelines:
No raw pointers (
newordelete).Correct ownership semantics using
std::unique_ptr.Const-correctness and pass-by-reference for non-owning parameters.
Uniform initialization (
{}) used consistently.Clean compilation with
-Wall -Werror -Wextra -pedantic-errors.Clear naming, concise comments, and documented units (radians, meters, rad/s).
Evaluation Rubric (36 pts)¶
Exceeds: Fully correct, robust, and idiomatic; anticipates edge cases.
Meets: Correct and idiomatic; minor issues that do not affect correctness.
Partial: Partially correct or missing important elements.
Insufficient: Incorrect, incomplete, or non-functional.
Note
Points for each sub-criterion are all-or-nothing unless otherwise noted. “Partial” earns half of the listed points for that sub-criterion when applicable.
Sub-criterion |
Evidence of Exceeds / Meets / Partial / Insufficient |
Pts |
|---|---|---|
POD structs with appropriate fields |
Exceeds/Meets: Correct fields; no invariants required; trivially copyable design. Partial: Missing a field or uses class features that break POD intent. Insufficient: Wrong or unusable structure. |
2 |
Default member initializers for all fields |
Exceeds/Meets: Sensible defaults set in-class; no uninitialized state. Partial: Defaults incomplete. Insufficient: No defaults; UB risk. |
2 |
Formatted printing (readable, labeled, consistent units) |
Exceeds: Clear labels, alignment, and units; no std::endl misuse; newline ‘n’. Meets: Clear output; minor formatting nits. Partial/Insufficient: Hard to read or missing fields. |
2 |
Sub-criterion |
Evidence of Exceeds / Meets / Partial / Insufficient |
Pts |
|---|---|---|
Correct FK equations and frame conventions |
Exceeds/Meets: Angles and link lengths used with correct trigonometry and ordering; frames documented. Partial: Minor sign or frame confusion with test mismatch. Insufficient: Incorrect mapping. |
3 |
Generic template design (types, constants) |
Exceeds: Template parameters or auto enable float/double; no unnecessary casts. Meets: Works for primary type with clean template signature. Partial/Insufficient: Hard-coded type or broken templating. |
2 |
Numerical sanity and edge cases |
Exceeds: Handles zero angles, extreme values, and boundary inputs; tests or asserts where appropriate. Meets: Works on nominal cases. Partial/Insufficient: Fails common cases. |
2 |
Clear API and documentation |
Exceeds/Meets: Function name, params, and returned pose are unambiguous; brief comment. Partial/Insufficient: Ambiguous or missing. |
1 |
Sub-criterion |
Evidence of Exceeds / Meets / Partial / Insufficient |
Pts |
|---|---|---|
Interpolation correctness with clamped \(\\alpha\) |
Exceeds/Meets: Implements alpha = clamp(alpha, 0, 1); linear blend for all fields as specified. Partial: Forgets clamping or a field. Insufficient: Incorrect formula. |
3 |
Velocity assignment proportional to \(\\Delta\\theta\) |
Exceeds/Meets: Uses k * Δθ consistently; rationale or constant visible. Partial: Applies to one joint only or mixes units. Insufficient: Missing or wrong. |
2 |
Filter application over trajectory (in-place transform) |
Exceeds/Meets: Iterates safely over all states; no copies unless required; lambda friendly. Partial: Inefficient copying or off-by-one. Insufficient: Incorrect application. |
2 |
Readability and test snippet |
Exceeds/Meets: Small demo or asserts; clear variable names. Partial/Insufficient: Hard to follow. |
1 |
Sub-criterion |
Evidence of Exceeds / Meets / Partial / Insufficient |
Pts |
|---|---|---|
Correct std::unique_ptr ownership |
Exceeds/Meets: Uses std::make_unique; no raw new in user code; reset only when justified. Partial: Mixed ownership patterns. Insufficient: Leaks or double-delete risks. |
3 |
RAII integration and lifetime clarity |
Exceeds/Meets: Resources released deterministically; no manual delete; scopes well defined. Partial: Lifetime unclear. Insufficient: Dangling usage. |
2 |
Avoids anti-patterns |
Exceeds/Meets: No std::move into same object; no copying unique_ptr; no |
2 |
Minimal, focused example |
Exceeds/Meets: Short example that compiles; comments explain ownership. Partial/Insufficient: Confusing or non-compiling. |
1 |
Checklist |
Evidence |
Pts |
|---|---|---|
Warnings clean: -Wall -Wextra -pedantic-errors |
Builds without warnings; uses ‘n’ instead of std::endl. |
2 |
Naming, constants, and initialization |
Consistent snake_case for vars; constexpr or const for magic numbers; uniform initialization {}. |
2 |
Documentation and structure |
Doxygen header present; files named per spec; functions short and single-purpose. |
2 |
Issue |
Penalty |
|---|---|
Wrong file naming or extra files in archive |
−4 pts each |
Project does not compile or compiles with warnings/errors |
−5 pts |
Missing or incomplete Doxygen header |
−3 pts |
Late submission (UMD policy) |
20% per day (max 3 days); after 3 days, 0 |
Learning Outcomes¶
Upon completing this assignment, you will:
Implement forward kinematics using modern C++ templates.
Generate smooth robot trajectories with interpolation and filtering.
Apply lambda functions and
std::functionfor modular control.Use smart pointers to ensure memory safety and proper ownership.
Write maintainable, standard-compliant C++ code following the C++ Core Guidelines.